MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) offers a new version of a superfast quadruped robot. While four-legged robots have been gaining attention for the past couple of years, one surprisingly everyday skill has eluded them: running.
The reason for this is that racing in a real environment is phenomenally complex. The fast pace leaves little room for robots to adapt to challenges (e.g. slippery surfaces, physical obstacles, or uneven terrain). Additionally, the stresses of racing push the hardware to its limits. Gabriel Margolis, PhD student at MIT CSAIL, and Ge Yang, postdoc at the Institute of AI and Fundamental Interactions (IAIFI), recently told MIT News:
“Under such conditions, the dynamics of the robot are difficult to model. The robot must react quickly to changes in the environment, such as when it encounters ice while running on grass. If the robot is walking, it moves slowly and the presence of snow is usually not a problem. Imagine that you are walking slowly, but carefully. You can cross almost any terrain. Today’s robots face a similar problem. The problem is that walking over any terrain as if you were walking on ice is very inefficient, but is common in today’s robots. Humans run fast on grass and slow on ice – we adapt. Giving robots similar adaptability requires quick identification of changes in terrain and quick adaptation to prevent the robot from falling. In summary, since it is impossible to build analytical (human-designed) models of all possible terrains in advance, and robot dynamics become more complex at high speeds, high-speed racing is more difficult than walking. »
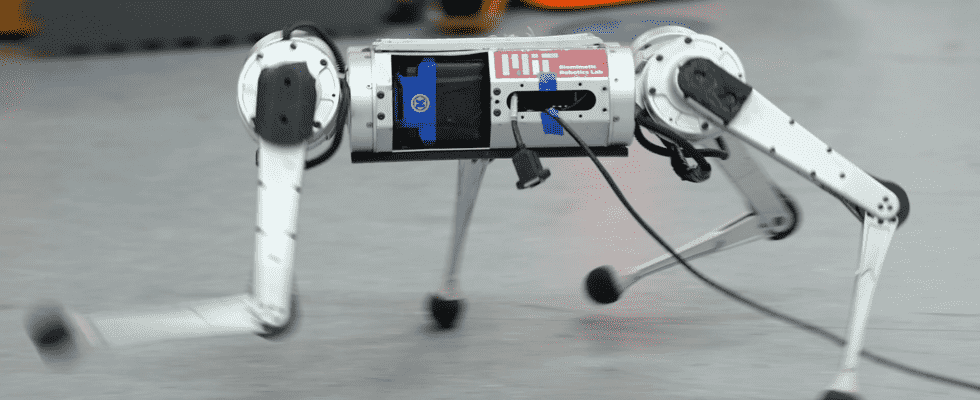
What sets MIT’s latest Mini Cheetah apart is how it handles this situation. Previously, the MIT Cheetah 3 and Mini Cheetah used running controllers designed by human engineers who analyzed the physics of locomotion, formulated deficient abstractions, and implemented a specialized hierarchy of controllers to make the robot balance and run. . The Spot robot, from Boston Dynamics, works the same way.
This new system is based on an experience model to learn in real time. In fact, by training its neural network in a simulator, the MIT robot can gain 100 days of experience in various terrains in just three hours.
“We have developed an approach that allows us to improve the behavior of the robot from the simulated experience, and our approach also allows, in a critical way, to successfully deploy these learned behaviors in the real world”, explains Gabriel. Margolis and Ge Yang.
“The intuition behind why the robot’s racing skills work well in the real world is that out of all the environments it sees in this simulator, some will teach the robot skills that are useful in the real world. When operating in the real world, our controller identifies and executes the relevant skills in real time,” they add.
Of course, like any good university research project, the Mini Cheetah is more proof of concept and development than a product, and the important thing here is how effectively a robot can be adapted to the real world. Gabriel Margolis and Ge Yang point out that robotics development and deployment paradigms that require human oversight and input for effective operation are not scalable.
In other words, manual programming is a labor-intensive activity, and we’re getting to a point where simulations and neural networks can do surprisingly faster work. Hardware and sensors from decades past are beginning to reach their full potential, heralding a new day when robots will walk among us.
In fact, they might even run.
Source: ZDNet.com