
NASA berichtet, dass ein wichtiger Meilenstein für einen neuen Roboterarm erreicht wurde, der auf der Internationalen Raumstation getestet wird. Die ISS verfügt bereits über Roboterarme, die sich außen befinden, wie etwa Canadarm2, das bei verschiedenen großen Aufgaben hilft, und den Roboterarm des Kibo-Labors, der speziell für Experimente auf diesem Modul verwendet wird. Dieser neue Arm soll universellen Manipulationen dienen, die den Aufgaben von Astronauten ähnlich sind.
Der ursprüngliche Canadarm wurde 1981 als Bestandteil des Space Shuttle Columbia gestartet. Er diente dazu, Nutzlasten aus der Shuttlebucht zu manövrieren. Dies war unter der Kontrolle von Astronauten innerhalb des Shuttles. Nach 90 Missionen wurde es schließlich ausgemustert und durch Canadarm2 auf der ISS ersetzt. Dieser viel fortschrittlichere Roboterarm kann außen an der Internationalen Raumstation ISS herumbewegt werden, um die Manipulation großer Objekte zu unterstützen, während er dem Astronauten an den Kontrollen Force-Feedback gibt und die automatische Kollisionsvermeidung verwendet.
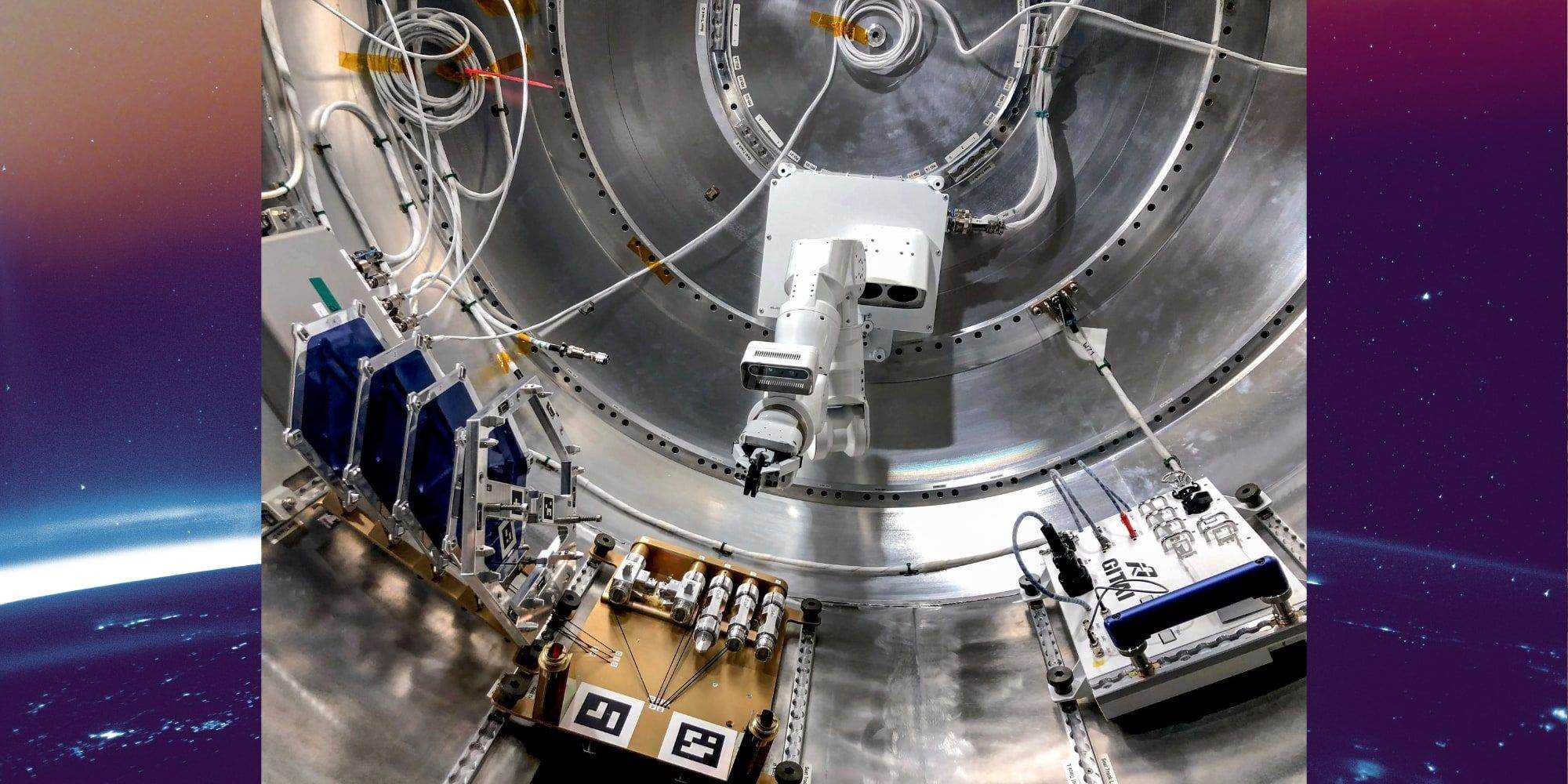
Der neueste Roboterarm, der auf der Internationalen Raumstation ankommt, ist der Gitai S1, ein halbautonomer Roboter, der innerhalb oder außerhalb eines Raumfahrzeugs operieren kann. Der Arm wurde in der neuen Nanoracks Bishop Airlock getestet, der ersten dauerhaften kommerziellen Ergänzung der ISS. Die Gita S1 erreicht eine Bewertung des Technology Readiness Levels von 7, und das Maximum ist 9. Das bedeutet, dass der Prototyp einen simulierten Test im Weltraum bestanden hat. Um TRL 8 zu erreichen, muss ein tatsächliches Produktionsmodell Tests am Boden oder im Weltraum abschließen. TRL 9 bedeutet erfolgreicher Einsatz in einer echten Mission. Der Arm verwendet eine Kombination aus autonomer und geführter Bedienung durch ein Bodenpersonal, um Schalter umzulegen, Knöpfe zu drücken und sogar technologische Geräte wie Solarmodule zusammenzubauen. Der Roboterarm soll Missionen bewältigen, die für Astronauten gefährlich werden könnten.
Der Plan der NASA für Roboterarme und sogar vollständige Roboter besteht darin, mit Astronauten zusammenzuarbeiten und sie nicht zu ersetzen. Roboterarme können dazu dienen, unter gefährlichen Bedingungen zu arbeiten und Objekte zu manipulieren, die von einem Menschen nicht verwaltet werden können. Weltraumspaziergänge sind von Natur aus gefährlich und körperlich anstrengend. Wenn routinemäßige Wartungsarbeiten und andere Aufgaben vom Roboterarm erledigt werden können, macht das das Leben der Astronauten einfacher und sicherer. Gitai S1 wurde entwickelt, um Schalter und Objekte zu manipulieren, die auch ein Astronaut verwenden könnte. Wenn Astronauten ersetzt würden, wären die Schalter elektronisch und nicht physisch.
In Zukunft könnten Roboterarme wie Gitais S1 und größere Geräte bei weit entfernten Missionen zum Mond oder Mars hilfreich sein, bei denen der Roboter den Weg für menschliche Reisende ebnen kann. Da die Gitai S1 einige Aufgaben autonom erledigen und ferngesteuert werden kann, eröffnet sie diese Fernsteuerung für verschiedene Missionen. Während weitere Tests erforderlich sind, bevor dieser Roboterarm in tatsächlichen Missionen eingesetzt werden kann, ist dies ein wichtiger Meilenstein für den Gitai S1, um Technology Readiness Level 7 zu erreichen.