
More and more surveillance cameras are focusing on public spaces, especially in cities. Many are already proficient in biometric face recognition, others could be retrofitted with the appropriate technology relatively easily. Martin Wieland from the unsurv project, together with supporters, has therefore set himself the task of creating a database of video cameras that have already been installed as up-to-date as possible. Tools for the largely automatic mapping of such electronic eyes should help.

At the rC3, Martin Wieland will be presenting three methods for recording surveillance camera positions: on foot using the OpenStreetMap editor, with a special Android app or a 360-degree camera.
(Image: Chaosstudio Hamburg)
The free map service OpenStreetMap (OSM) can be used as a documentation directory for digital countermeasures, explained Wieland on Thursday at the online hacker conference rC3 (remote Chaos Communication Congress). You can display your own objects such as cameras under the tag “man_made = surveillance”. Most of the map services based on OSM did not display these entries. The global project Surveillance under Surveillance does this, however. Most cameras are therefore already registered in Germany, France and the USA, although the density in Great Britain is likely to be significantly higher. Officials there call for denunciation when people take pictures of the Big Brother instruments, for example with their cell phones.
In general, there is still a lot to be done to complete the database for monitoring the supervisors, stressed Wieland. Many cameras were registered in 2012, then again in 2018. The data could therefore be partly out of date. There is also a programming interface (API) called Overpass to allow data to be output. You can manually enter cameras yourself using the OpenStreetMap editor Verspucci for Android smartphones.
AI and app as a mapping aid
To simplify the process, the IT expert developed his own unsurv app for Google’s mobile operating system. To do this, he built in the search engine giant’s TensorFlow object recognition, which he trained to detect video cameras. The app is still in beta, so it’s not yet available through the Play Store or the alternative open source registry F-Droid. However, it can be downloaded and installed via the unsurv Github page. For an upcoming version, Wieland wants to purify the TensorFlow implementation and make Artificial Intelligence (AI) better.
The detected cameras could then be filtered by type and the monitored zone, the hacker explained. He added a newer editor for this. The data could then be exported to CSV and imported into the OSM editor. An Internet connection is not required for this in order to leave as few traces as possible, such as cell data. The object recognition runs directly on the cell phone.
Wieland has meanwhile also added functions for group activities. So it is possible to lay a grid over a map and divide the work for individual squares that can be identified with it. The participants could then upload the results together in a café in the evening so as not to reveal their home IP addresses.
Automatic capture
The inventor also came up with the idea of using the unsurv app with a 360-degree camera that costs around 300 euros in semi-professional quality, a Coral Dev Board Mini from Google that is geared towards machine learning as an “AI accelerator” and a to connect inexpensive ESP32 microcontroller from Espressif for position detection. The latter communicates with a GPS board and uses it to log the location when a photo is output.
The connection is made via a USB cable, which then protrudes from the backpack, in which it can be carried, explained Wieland. The AI unit sometimes makes it necessary to post-process a panorama photo and adjust the proportions. The object recognition with the Mini then only needs around 25 milliseconds for a picture, so that 40 frames per second can be worked through.
Your own device as an offline tracker

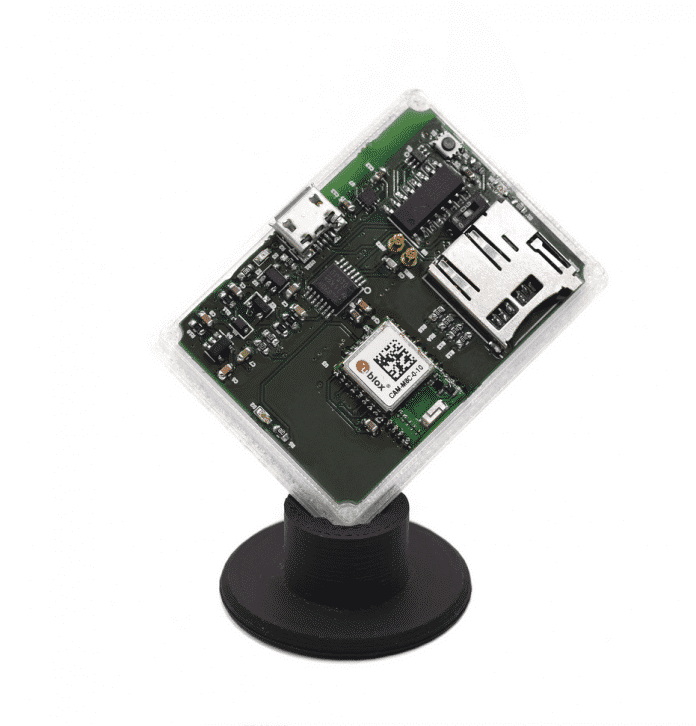
The gadget logs the geo-location of the wearer and compares it with a database of surveillance cameras.
(Image: https://github.com/unsurv/unsurv-offline)
With unsurv-offline, the hobbyist has also developed a small, independent device that logs potential monitoring and tracking incidents throughout the day. An Android app summarizes these in a report for the user. The core of the inconspicuous companion is a small printed circuit board (PCB) with a GPS chip. It can be operated with a rechargeable battery, which is activated by a sensor when moving. There is also a dynamic NFC tag for near-field communication with the smartphone. The camera positions are saved on an SD card. According to Wieland, the report shows “which cameras filmed you from which angle”. Downloading and importing with OSM is also possible here.
As future research approaches and fields of application, Wieland can imagine giving a representative group of people the trackers in their pockets and seeing “who is disproportionately affected by surveillance measures”. A “routing service” based on the motto: “How many cameras do I want to meet on the way?” Is also conceivable. For the summer, the activist, who was particularly shocked by the pilot project for automated face recognition at Berlin’s Südkreuz train station, is planning “mapping parties” in some cities together with the EU initiative “Reclaim your Face”, which campaigns against cameras with biometric analysis capabilities.
(ps)