30. Juni 2020 durch Steve Hanley
Tesla lieferte die ersten Hinweise darauf, dass Radar trainiert werden kann, um mehr als nur Objekte geradeaus zu erkennen. Nach dem Tod von Joshua Brown auf einer Autobahn in Florida im Jahr 2016 hat Tesla die von MobilEye entwickelte Autopilot-Software zerrissen und von einem kamerabasierten zu einem radarbasierten System gewechselt. Dabei lernte es, Radarsignale direkt unter dem Auto abzuprallen, um zu „sehen“, was das nächste Auto in der Reihe tat. Auf diese Weise kann ein Tesla mit dem aktualisierten System, wenn ein LKW oder SUV die Sicht auf die Straße blockiert, immer noch erkennen, ob ein Auto weiter oben auf der Straße langsamer wird oder unerwartet bremst, und geeignete Maßnahmen ergreifen.
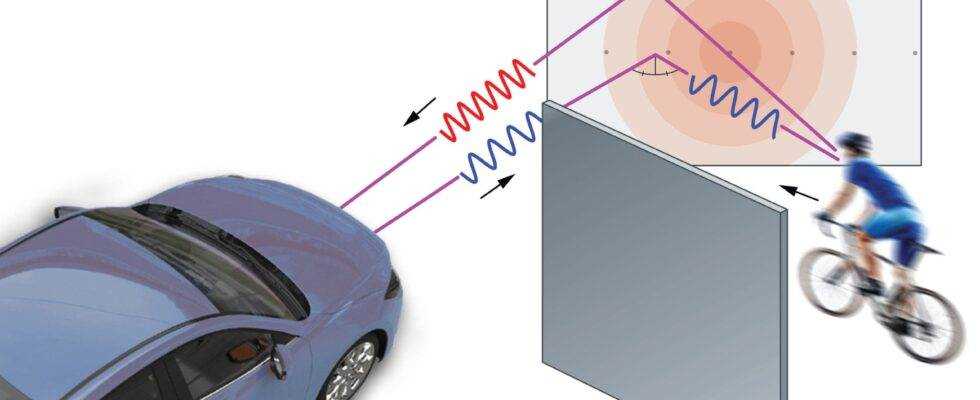
Bildnachweis: Princeton Universität
Eine der Herausforderungen beim Entwurf von Steuerungssystemen für autonom fahrende Autos besteht darin, vorauszusehen, ob ein Fußgänger, Radfahrer oder anderer Autofahrer den beabsichtigten Weg des Fahrzeugs überqueren wird. Verschiedene High-Tech- (und kostenintensive) Systeme wurden mit nur begrenztem Erfolg ausprobiert.
Jetzt sagen Forscher der Princeton School of Engineering, sie hätten einen Algorithmus für künstliche Intelligenz entwickelt, der diese Informationen aus den Hintergrundgeräuschen herausfiltern kann, die mit gewöhnlichen – kostengünstigen – Radargeräten verbunden sind. Ihr Forschung wurde vorgestellt zur Konferenz über Computer Vision und Mustererkennung am 16. Juni.
„Auf diese Weise können Autos verdeckte Objekte sehen, die heutige Lidar- und Kamerasensoren nicht aufzeichnen können. So kann beispielsweise ein selbstfahrendes Fahrzeug eine gefährliche Kreuzung sehen“, sagt Felix Heide, Assistenzprofessor für Informatik in Princeton und einer der Forscher . "Die Radarsensoren sind auch relativ kostengünstig, insbesondere im Vergleich zu Lidar-Sensoren, und lassen sich auf die Massenproduktion skalieren."
Nach einem Online-Beitrag von Princeton,
„Das System, das sich problemlos in heutige Fahrzeuge integrieren lässt, verwendet Doppler-Radar, um Funkwellen von Oberflächen wie Gebäuden und geparkten Autos abzuprallen. Das Radarsignal trifft schräg auf die Oberfläche, sodass seine Reflexion wie ein Spielball auf die Wand eines Billardtisches zurückprallt. Das Signal geht weiter, um Objekte zu treffen, die um die Ecke versteckt sind.
„Ein Teil des Radarsignals wird zu den am Auto montierten Detektoren zurückgeworfen, sodass das System Objekte um die Ecke sehen und feststellen kann, ob sie sich bewegen oder stationär sind. Der vorgeschlagene Ansatz ermöglicht eine Kollisionswarnung für Fußgänger und Radfahrer in realen autonomen Fahrszenarien – bevor sie mit vorhandenen direkten Sichtliniensensoren angezeigt werden. “
„Die von uns entwickelten Algorithmen sind hocheffizient und passen auf Automobilhardwaresysteme der aktuellen Generation“, sagt Heide. "Vielleicht sehen Sie diese Technologie bereits in der nächsten Fahrzeuggeneration."
Um es dem System zu ermöglichen, Objekte zu unterscheiden, die für optische Sensoren wie Kameras nicht sichtbar sind, verarbeitete das Heide-Team einen Teil des Radarsignals, das Standardradargeräte eher als Hintergrundgeräusche als als verwendbare Informationen berücksichtigen. Das Team verwendete Techniken der künstlichen Intelligenz, um die Verarbeitung zu verfeinern und die Bilder zu lesen. Fangyin Wei, ein Doktorand der Informatik und einer der Hauptautoren des Papiers, sagte, der Computer, auf dem das System läuft, müsse lernen, Radfahrer und Fußgänger anhand einer sehr geringen Datenmenge zu erkennen.
„Zuerst müssen wir feststellen, ob etwas da ist. Wenn da etwas ist, ist es wichtig? Ist es ein Radfahrer oder ein Fußgänger? " Sie sagte. "Dann müssen wir es finden." Laut Wei erkennt das System derzeit Fußgänger und Radfahrer, da die Ingenieure der Ansicht waren, dass dies aufgrund ihrer geringen Größe und der unterschiedlichen Form und Bewegung die schwierigsten Objekte sind. Sie sagte, das System könne angepasst werden, um auch Fahrzeuge zu erkennen.
Da das Princeton-System auf der vorhandenen Radarsensortechnologie basiert, sollte die Integration in die nächste Generation von Automobilen ein unkomplizierter Prozess sein, sagt Heide. „In Bezug auf die Integration und die Markteinführung ist viel Engineering erforderlich. Aber die Technologie ist da, also gibt es das Potenzial, dies sehr bald in Fahrzeugen zu sehen. “
Das Forschungsteam bestand aus Jürgen Dickmann, Florian Krause, Werner Ritter und Nicolas Schiener von Mercedes-Benz, Buu Phan und Fahim Mannan von Algolux, Klaus Dietmayer von der Universität Ulm und Bernard Sick von der Universität Kassel. Teilfinanzierung erfolgte durch das ECSEL-Programm H2020 der Europäischen Union.
Das Training des Radars zum Sehen um Ecken könnte ein wichtiger Schritt in Richtung Fahrzeugsicherheit sein und Verletzungen von Personen, die in der Nähe von Fahrzeugen, die mit dieser neuen Technologie ausgestattet sind, laufen oder Fahrrad fahren, erheblich reduzieren.
Unterstützen Sie CleanTechnica mit nur 3 US-Dollar pro Monat

Über den Autor
Steve Hanley Steve schreibt über die Schnittstelle zwischen Technologie und Nachhaltigkeit in seinen Häusern in Florida und Connecticut oder anderswo, wo ihn die Singularität führen könnte. Du kannst ihm folgen Twitter aber nicht auf Social-Media-Plattformen, die von bösen Overlords wie Facebook betrieben werden.